ANNEXE - Programmation système - Exemples
Automne 2018
Ce document présente quelques appels systèmes Unix. Pour dire les choses simplement, un appel système est un moyen, pour un programme utilisateur, de solliciter un service auprès du système d’exploitation; c’est une interface entre le user space et le kernel space.
Tout au long de ce document nous utiliserons le fil conducteur suivant : "Par quels moyens faire communiquer deux programmes?". Pour cela nous évoquerons différentes techniques (plus ou moins heureuses) et les différents appels systèmes sous-jacents.
Notez que nous n’aborderons pas le mécanismes de sockets, qui fait l’objet d’un TP spécifique par ailleurs.
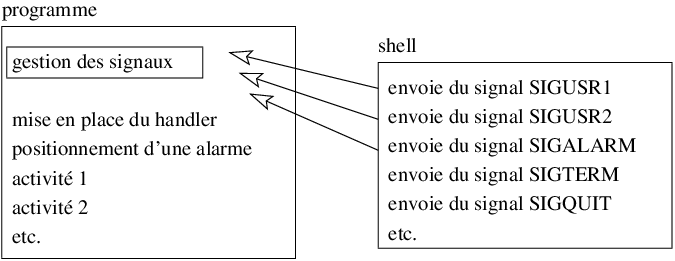
Cet exemple montre comment manipuler les signaux Unix. Ce petit programme positionne tout d’abord un gestionnaire d’interruptions pour traiter la réception de certains signaux. Ensuite ce programme réalise ses activités courantes.
Ce programme a pour seule activité courante la charge d’afficher le caractère point ’.’ toutes les deux secondes. Ce délai de deux secondes est réalisé par la fonction sleep(3) (voir également usleep(3) et nanosleep(2)). Cette fonction peut également être interrompue à la réception d’un signal; elle renvoie alors le nombre de secondes qu’il lui restait à dormir.
Un même gestionnaire d’interruptions est utilisé pour traiter différents signaux. On aurait pu évidemment positionner des gestionnaires différents pour chaque signal. Les signaux interceptés sont SIGALRM, SIGUSR1, SIGHUP et SIGQUIT; le signal SIGUSR2 est ignoré; les autres signaux seront pris en compte par le gestionnaire par défaut qui provoque la terminaison brutale du processus.
Les signaux peuvent être envoyés à ce processus par la commande shell kill(1) (voir également la commande killall(1)). Ouvrir donc un premier terminal shell dans lequel vous exécutez le programme donné en exemple, et en parallèle ouvrir un second terminal shell dans lequel vous exécutez des commandes kill. Pour faciliter les choses, le programme donné en exemple commence par afficher sont numéro de processus (pid). Autrement, ce numéro pourrait être retrouvé par la commande shell ps(1).
Vous êtes donc invités à essayer d’envoyer à ce programme différents signaux : SIGALRM, SIGUSR1, SIGUSR2, SIGHUP, SIGQUIT, SIGTERM, etc. Notez la réaction du programme de test.
Vous remarquerez également que le signal SIGALRM est envoyé d’une manière bien particulière. En effet, outre la manière classique d’envoyer des signaux avec kill, un processus à la possibilité de positionner une alarme qui demande au noyau de lui envoyer le signal SIGALRM dans x secondes. Ceci est obtenu par l’appel système alarm(2).
Note. Dans cet exemple nous avons utilisé l’API ANSI C pour positionner nos gestionnaires d’interruptions. Cette API, relativement simple d’utilisation, peut voir son comportement varier suivant les systèmes Unix et les versions de la libc utilisés. On préférera donc utiliser l’API POSIX sigaction(2). Il en sera ainsi dans les exemples suivants.
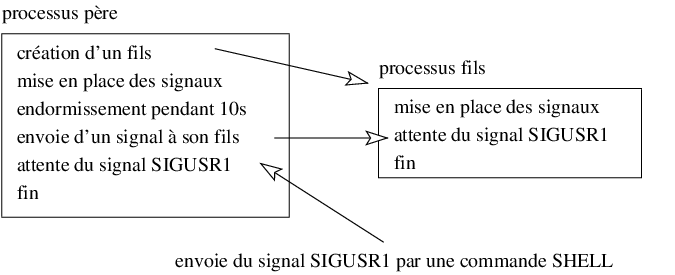
Cet exemple montre comment manipuler les signaux pour réaliser la synchronisation de deux processus s’échangeant des données travers un fichier. Tout d’abord, le processus (père) crée un autre processus (fils). Ensuite, les deux processus se synchronisent en utilisant les signaux de manière à se coordonner pour lire et écrire dans un fichier. Pensez observer ce qu’il se passe partir de commandes lancées dans le SHELL.
Le programme principal lance un processus fils. Ces deux processus sont sensibles au signal SIGUSR1. Ils affichent un message avant de se tuer la réception du signal SIGUSR1. Le fils fait une boucle infinie. Le père après une attente de 10 secondes (sleep(3)) envoie un signal son fils et fait ensuite une boucle infinie. Pour arrêter le père envoyez partir du SHELL un signal SIGUSR1.
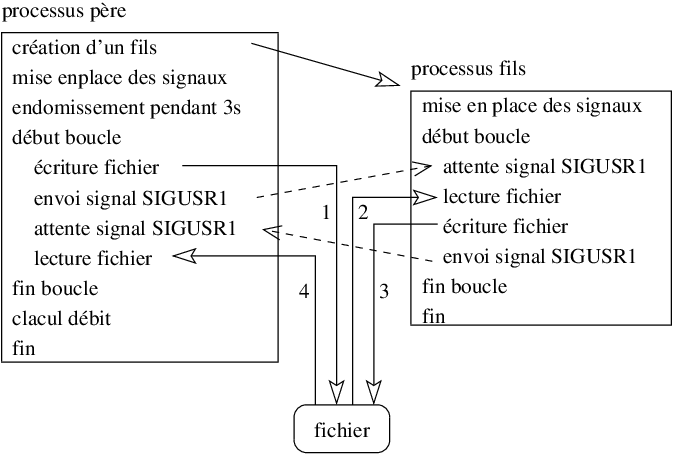
Nous complétons le programme précédent afin de réaliser la communication de données par utilisation d’un fichier entre le processus père et le processus fils. Les deux processus réalisent un certain nombre de ping-pong.
Le père commence par écrire des données dans un fichier, il prévient ensuite son fils par un signal que les données sont prêtes. Le fils, qui s’était mis en attente d’un signal au moyen de l’appel système pause(2), se débloque. Il lit les données et écrit ses propres données dans le fichier. Il prévient alors son père qu’il peut venir lire les données dans le fichier. Le père se débloque et vient lire les données du fils dans le fichier tampon et ainsi de suite.
Le père et le fils s’échangent un entier différent chaque communication. Une boucle réalise 1000 ping-pong. Nous mesurons le débit (d en Mb/s) en mesurant la date (appel système time(2)) avant la première écriture du père (td) et après la dernière lecture du père (tf). La taille des données est la taille d’un entier soit 4 octets. d = 
Note : Ce programme comporte un énorme bug (pédagogique), bien que l’algorithme semble intuitivement "correct". En effet, lorsque l’on se met en attente d’un signal SIGUSR1 pour être débloqué (à l’aide de l’appel système pause()), on attend un signal qui sera envoyé dans le futur. Cependant, il se peut que le partenaire l’ait envoyé avant même que l’on se mette en attente... Considérons par exemple le scénario suivant : le père envoit un signal au fils pour le débloquer, le fils fait tout son travail et envoie à son tour un signal au père pour le débloquer, qui malheureusement ne s’est pas encore mis en attente, ayant été suspendu par le scheduleur entre le kill() et le wait(). Les deux processus se retrouvent chacun en attente de l’autre : un inter-blocage. On peut exécuter ce programme des centaines de fois sans que ce bug ne survienne, mais il est bien présent.
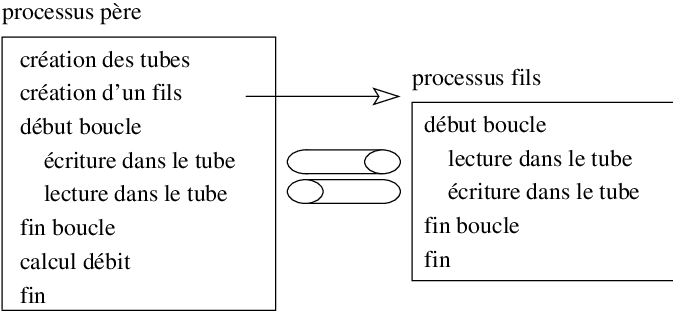
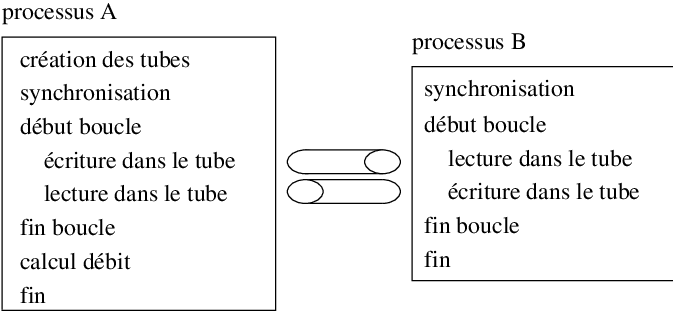
Nous reprenons le principe de l’exemple précédent. Cependant la méthode de communication est différente ici : nous allons utiliser les tubes.
Chaque processus renvoie le débit calculé. Notez que les tubes sont monodirectionnels et nous utilisons donc deux tubes : un pour envoyer et un pour recevoir. Afin de ne pas être tenté d’utiliser un tube dans les 2 sens de communication, nous fermerons les descripteurs ne vous servant pas.
Nous reprenons le principe du ping-pong en utilisant comme méthode de communication et de synchronisation uniquement le tube non nommé. Ceci est possible grâce au lien de parenté entre les deux processus. Les tubes simples sont créés par l’appel système pipe(2).
On désire faire communiquer deux processus indépendants, sans relation de filiation. On utilise ici des tubes nommés qui permettent cela. Les tubes nommés sont des fichiers spéciaux et sont créés par la fonction mkfifo(3).
Il nous faut écrire soit deux programmes ou bien, ce qui est mieux, un seul programme qui se comportera soit comme le processus A soit comme le processus B en fonction d’un attribut passé en ligne de commande. Vous noterez au passage l’utilisation de la fonction getopt(3) pour nous aider à parser la ligne de commande de manière élégante. Ouvrez deux terminaux shell, dans l’un fous exécuterez le programme avec l’option -a, puis dans l’autre vous exécuterez le même programme mais avec l’option -b.
Il faut faire attention au problème de synchronisation initiale. Normalement, l’ouverture d’une file FIFO est bloquante jusqu’à ce que l’autre côté soit aussi ouvert. Il faut donc faire attention à ce que le premier tube nommé ait ses extrémités ouvertes en lecture d’une part et en lecture d’autre par chacun des deux processus, avant de traiter le second tube. Si l’on croise (un processus ouvre le premier tube alors que l’autre processus ouvre l’autre tube) on va s’interbloquer, si on utilise bien cette ouverture bloquante, cela nous permet de synchroniser le démarrage de nos deux processus. Pour plus de détails, lire le man de fifo(4).
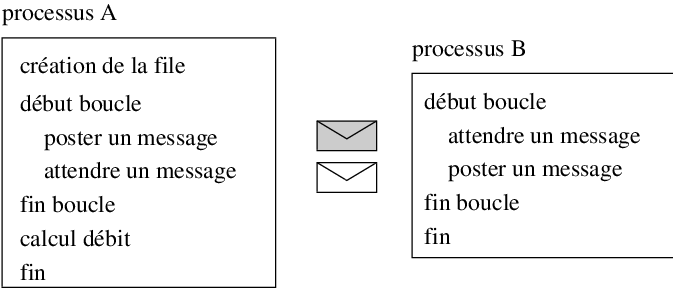
Cet exemple reprend le principe des exemples précédents. C’est simplement la méthode de communication qui est différente. Ici, on va utiliser les files de messages IPC. Chaque processus renvoie le débit calculé.
On désire faire communiquer deux processus indépendants, sans relation de filiation. On utilise ici les files de messages IPC qui permettent cela. Il s’agit d’un service de messagerie (texte) offert par les Inter Processus Communication (IPC).
Comme précédemment nous écrirons un seul programme mais qui adoptera soit le comportement du processus A soit celui du processus B en fonction d’un attribut passé en ligne de commande.
Nous utiliserons une seule file de messages, mais les messages seront typés de manière à indiquer s’ils sont de A pour B ou bien de B pour A. Chaque processus récupère par l’appel système msgget(2) un identifiant de messagerie à partir d’un numéro de clef commun. Une fois la file de message créé avec l’appel système msgget(2), les messages sont postés avec msgsnd(2), et reçus grâce à l’appel système msgrcv(2). L’appel système msgctl(2) permet de contrôler la file de message, positionner des permissions, lire des informations comme le pid ou la date du dernier lecteur ou écrivain, ou encore pour supprimer la file.
Note : Messages texte. Les messages sont à priori de nature textuelle. Ce qui explique les conversions mise en œuvre dans l’exemple. Cependant, rien n’interdit formellement de tenter de s’échanger des informations binaires.
Note : File de messages POSIX <mqueue.h>. La norme POSIX définie également un système de messagerie interprocessus, à ne pas confondre avec le système de messagerie IPC. Les messages POSIX apportent le même type de service si ce n’est qu’il s’agit de files de messages nommées (comme des fichiers), et que nous avons en plus une notion de priorité. Les fonctions sur les files de messages POSIX sont : mq_open(3RT), mq_close(3RT), mq_unlink(3RT), mq_send(3RT), mq_receive(3RT), mq_notify(3RT), mq_setattr(3RT). Les programmes doivent être compilés avec la librairie librt.
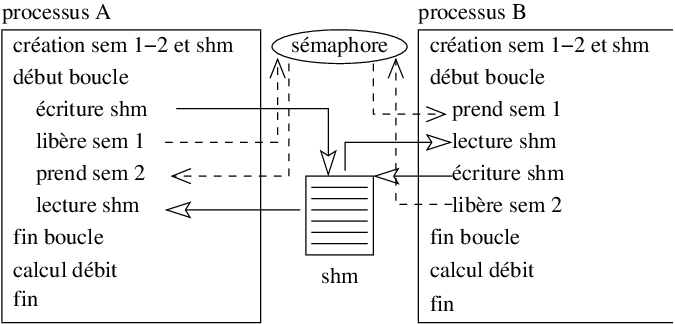
Cet exemple reprend le principe du ping-pong des exemples précédent. C’est simplement la méthode de communication qui est différente. Ici, on va utiliser de la mémoire partagée et des sémaphores pour la synchronisation. Chaque processus renvoie le débit calculé.
Même si nous utilisons qu’un seul bloc de mémoire partagée (une seule section critique), nous devons nous assurer que nos deux processus vont y accéder alternativement. Pour cela, nous avons besoin de deux sémaphores.
Selon la philosophie des sémaphores IPC, on associe un tableau de sémaphores à une clef. Nous utilisons donc un tableau de deux sémaphores. Nous aurions pu utiliser également deux tableaux de un sémaphore. Ceci n’aurait pas eu d’impact sur l’algorithme que nous avons. Par ailleurs nous utilisons nos sémaphores comme de simples mutex.
Après avoir créé un segment de mémoire partagé avec shmget(2), chaque processus doit l’attacher dans son espace d’adressage avec shmat(2). Après utilisation, ils devront le détacher avec shmdt(2) avant de supprimer le segment avec shmctl(2). Les sémaphores sont créés avec semget(2). Les processus réalisent une ou plusieurs opérations de manière atomique sur un tableau de sémaphore avec semop(2), et sont mis en attente ou réveillés suivant les besoins. L’appel système semctl(2) permet d’initialiser la valeur d’un sémaphore, de la lire, de détruire un ensemble de sémaphore, etc.
Vous noterez au passage l’utilisation de atexit(3) qui permet d’enregistrer une procédure pour être exécutée à la terminaison du processus.
Note : Mémoire partagée POSIX. La norme POSIX permet également de partager de la mémoire entre processus. Il s’agit essentiellement d’une variation de la technique de projection en mémoire des fichiers avec mmap(2) : on utilise alors shm_open(3) et shm_unlink(3) à la place de open() et close().
Note : Sémaphores POSIX <semaphore.h>. La norme POSIX définie également un mécanisme de synchronisation interprocessus par sémaphores. Au contraire des sémaphores IPC, une structure de sémaphore POSIX définie un simple et unique sémaphore, et non pas un tableau de sémaphores. Par ailleurs, selon la philosophie POSIX les sémaphores sont identifiés par un nom plutôt que par un numéro de clef. Les opérations sur les sémaphores POSIX sont : sem_open(3RT), sem_init(3RT), sem_close(3RT), sem_unlink(3RT), sem_destroy(3RT), sem_getvalue(3RT), sem_wait(3RT), sem_trywait(3RT), sem_post(3RT).
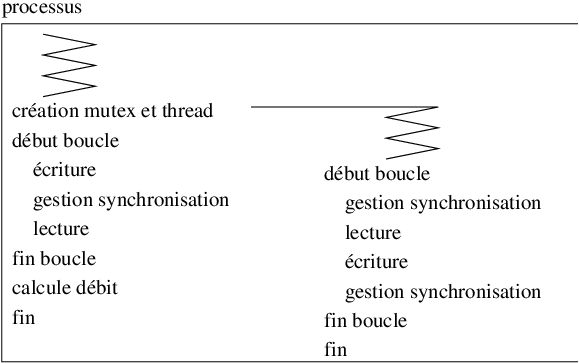
Cet exemple présente la programmation des threads. Nous reprenons le programme précédent, mais cette fois-ci les threads vont réaliser un ping-pong en utilisant la mémoire locale. La synchronisation se fera en utilisant les mutex dédiés aux threads. Nous calculerons aussi le débit.
Un thread est créé par pthread_create(3). Il s’achève avec un pthread_exit(3). Un thread peut être rejoint par un autre (i.e. on attend sa terminaison) par pthread_join(3).
Un mutex est créé par pthread_mutex_init(3) et détruit par pthread_mutex_destroy(3). Un mutex peut être pris par un thread avec pthread_mutex_lock(3) ou pthread_mutex_trylock(3), et relâché avec pthread_mutex_unlock(3).
Note : threads Solaris <thread.h>. Solaris, grand précurseur dans le domaine, avait également défini son propre système de gestion des threads. Notons qu’aujourd’hui les threads POSIX sont également disponibles sous Solaris. Pour des raisons de probabilité nous préférerons donc utiliser les threads POSIX.
Nous avons abordé différentes techniques pour partager de l’information entre deux processus (sans aborder les sockets qui font l’objet d’un autre TP). Pour être exhaustif sur le sujet, et bien que ce soit tiré par les cheveux, évoquons le cas de ptrace().
Une différence notable entre les processus légers (threads) et les processus lourds, c’est que les premiers partagent le même espace mémoire, alors que les seconds voient leurs espaces mémoires bien cloisonnés... mais pas toujours. L’exception vient avec l’appel système ptrace() (voir le man 2 ptrace) qui permet à un processus de s’attacher à un autre (tout en devenant son père) : cela lui permet de contrôler son exécution et d’accéder à son espace mémoire.
Cela est utilisé à des fins de débuggage (outils gdb strace etc.), voir pour du reverse engineering 1, mais rârement pour de la communication entre processus (d’ailleurs, cet appel système pose des problèmes de probabilité).
1.Nicolas Bareil, "Playing with ptrace() for fun and profit - Injection de code sous Linux", SSTIC 2006, http://actes.sstic.org/SSTIC06/Playing_with_ptrace/